- Directly Integrable D.E.
- Separable D.E.
- Linear 1st order D.E. : Integrating factor
- Homogeneous 1st order D.E.
- Bernoui D.E.
- Exact D.E.
- Linear 2nd order D.E.
- 2nd order D.E. : Reduction of order
- 2nd order D.E. : Constant Coefficients
- 2nd order D.E. : Undetermined Coefficients
- Wronskian For a Group of Functions
- 2nd order D.E. : Variation of Parameters
- Cauchy-Euler Eq.
- Laplace Transform
- Linearity of Laplace Transforms
- Laplace Transforms of Derivatives
- Laplace Transforms to Solve D.E.
- Unit Step Function
- Laplace Transforms Involving the Unit Step Function
- Impulse and Dirac Delta Function
- How to shift the Index for Power Series
- Solving D.E. with Power Series
- Solving D.E. Linear system with eigenvalue and eigenvector
Directly Integrable D.E.
그냥 적분하면 되는 형태.
\begin{matrix}
\begin{align*}
y^\prime = f(x) \\
y^{\prime\prime} = f(x) \\
\end{align*} & \quad
\begin{align*}
ex)\quad \frac{dy}{dx} = 6x^2 + 4
\end{align*}
\end {matrix}Separable D.E.
왼쪽은 y에 대해서만, 오른쪽 x에 대해서만 나오도록 정리. 양쪽을 각각 y, x에 대해서 적분하면 됨.
\begin{matrix}
\begin{align*}
\frac{dy}{dx} = f(x)g(y) \quad \rightarrow
\end{align*}
\begin{align*}
\frac{dy}{g(y)} = f(x)dx \\
\int \frac{1}{g(y)}dy = \int f(x)dx
\end{align*}
\end{matrix}예1)
\begin{align*}
y^{\prime} = \frac{x}{y} \quad \rightarrow \quad ydy = xdx \\
\int ydy = \int xdx \\
\frac {1}{2}y^2 + C_1 = \frac{1}{2}x^2 + C_2 \\
y^2 = x^2 + C \; or \; y = \pm \sqrt{x^2 + C}
\end{align*}예2)
\begin{align*}
\frac{dy}{dx} - x = xy^2 \\
\int \frac{1}{y^2+1}dy = \int xdx \\
tan^{-1} y + C_1= \frac{1}{2}x^2 + C_2 \\
\therefore \quad y = tan(\frac{1}{2}x^2 + C)
\end{align*}
Linear 1st. order eq. : Intergrating factor
\begin{align*}
\frac{dy}{dx} + p(x)y = q(x)
\end{align*}
Integrating factor 는 다음과 같다.
\begin{gather*}
\frac{d(uy)}{dx} = uy\prime + u\prime y \\
\frac{du(x)}{dx} = up(x) \quad 를 \; 만족하는 \quad u \quad 를 \; 가정하면, \\
\int \frac{du}{u} = \int pdx \\
ln|u| = \int pdx \\
u = e^{\int pdx} \quad : Integrating \; factor!
\end{gather*}
위에서 구한 integrating factor를 원래 식의 양변에 곱하면,
uy^{\prime} + upy = uq \\
\rightarrow uy^{\prime} + u^{\prime} y = uq \\
\rightarrow d(uy)/dx = uq결과적으로 integrating factor를 곱해줌으로 해서, seperable 형태로 바뀜.
예 1)
y^{\prime} + y = e^xintegrating \; factor \;u = e^{\int pdx} = e^x \\
e^x(y^{\prime} + y) = e^{2x} \\
\frac{d(e^x y)}{dx} = ye^x = \int e^{2x}dx \\
= \frac{1}{2}e^{2x} + C \\
\therefore y = \frac{1}{2}e^x + Ce^{-x}예 2) RL circuit
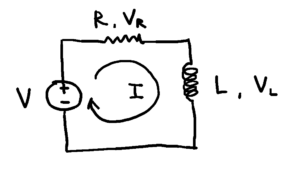
KVL : V - V_R - V_L = 0 \\
\begin{cases}
V_R = IR \\
V_L = L \frac{dI}{dt}
\end{cases} L \frac{dI}{dt} + RI = VI^{\prime} + \frac{R}{L}I = \frac{V}{L} \\
\begin{align*} \end{align*} \\
u = e^{\int \frac{R}{L}dt} = e^{\frac{R}{L}t} \\
\begin{align*} \end{align*} \\
\int e^{\frac{Rt}{L}}[\frac{dI}{dt} + \frac{R}{L}I]dt = \int \frac{V}{L}e^{\frac{Rt}{L}}dt \\
\begin{align*} \end{align*} \\
e^{\frac{Rt}{L}}I = \int \frac{V}{L}e^{\frac{Rt}{L}}dt = \frac{V}{R}e^{\frac{Rt}{L}} + C \\
\begin{align*} \end{align*} \\
I = \frac{V}{R} + Ce^{-Rt/L} \\
\begin{align*} \end{align*} \\
I(0) = I_0, I_0 = \frac{V}{R} + C, C = I_0 - \frac{V}{R} \\
\begin{align*} \end{align*} \\
I(t) = \frac{V}{R} + (I_0 - \frac{V}{R})e^{-Rt/L}
Homogeneous 1st order D.E.
Not Separable, Non linear 한 경우 Substitution Methods 를 사용. 1) Homogeneous, 2) Bernoulli
여기서 homogeneous는 linear equation을 말하는게 아님.
\text{If the eq. is in the form, } \frac{dy}{dx} = f(x, y) \\
\begin{align*} \end{align*} \\
\equiv M(x, y)dx + N(x, y)dy = 0\\
\begin{align*} \end{align*} \\
\text{homogeneous condition : } f(x, y) = f(tx, ty)위의 조건을 만족하면, homogeneous. 이건 homogeneous test 에 사용될 수 있음.
이 경우, substitution method는 다음과 같이 치환하는 것.
\begin{cases}
\quad y = vx \quad or \quad v = y/x\\
\quad dy = vdx + xdv
\end{cases}이를 적용하면, 원래식이 seperable이 된다.
\frac{dy}{dx} = f(x, y) \\
\begin{align*} \end{align*} \\
[ vdx + xdv ] = f(x, y)dx = f(tx, ty)dx \\
\begin{align*} \end{align*} \\
t = 1/x \;\text{로 놓으면}, f(tx, ty) = f(1, y/x) = f(y/x) = f(v)
\begin{align*} \end{align*} \\
\therefore \frac{1}{f(v) + v}dv = \frac{1}{x}dx예)
\frac{dy}{dx} = \frac{x}{y} + \frac{y}{x} \\
\begin{align*} \end{align*} \\
f(tx, ty) = \frac{tx}{ty} + \frac{ty}{tx} = \frac{x}{y} + \frac{y}{x} = f(x, y) \\
\begin{align*} \end{align*} \\
\therefore \text{Homogeneous equation} \\
\begin{align*} \end{align*} \\
y = vx, dy = vdx+xdv \\
\begin{align*} \end{align*} \\
\frac{vdx + xdv}{dx} = \frac{x}{vx} + \frac{vx}{x}
\begin{align*} \end{align*} \\
xdv = \frac{1}{v}dx \\
\begin{align*} \end{align*} \\
\int vdv = \int \frac{1}{x}dx \\
\begin{align*} \end{align*} \\
\frac{1}{2}v^2 = ln|x| + C \\
\begin{align*} \end{align*} \\
\frac{1}{2}(\frac{y}{x})^2 = ln|x| + C \\
\begin{align*} \end{align*} \\
y^2 = 2x^2ln|x| + Cx^2 \\
\begin{align*} \end{align*} \\
\therefore y = \pm \sqrt{2x^2ln|x| + Cx^2}Bernoui D.E.
\frac{dy}{dx} + f(x)y = g(x)y^nv = y^{1-n} \quad \text{substitution} \\
\begin{align*} \end{align*} \\
n = 1 \quad \text{이면} \quad \text{linear} \quad \therefore n \neq 0, 1 \text{인 경우,} \\
\begin{align*} \end{align*} \\
\text{substitution을 이용하면 linear형태로 변환 가능}예)
\frac{dy}{dx} - \frac{y}{x} = xy^2 v = 1/y, \frac{dv}{dx} = - \frac{1}{y^2} \frac{dy}{dx} \quad \text{substitution을 적용} \\
\begin{align*} \end{align*} \\
\frac{dv}{dx} + \frac{1}{x}v = -x \\
\begin{align*} \end{align*} \\
\text{integrating factor : } e^{\int \frac{1}{x} \cdot dx} = e^{lnx} = x \\
\begin{align*} \end{align*} \\
\int [x \frac{dv}{dx} + v]dx = - \int x^2 dx \\
\begin{align*} \end{align*} \\
xv = -\frac{1}{3}x^3 + C \\
\begin{align*} \end{align*} \\
v = -\frac{1}{3}x^2 + \frac{C}{x} \\
\begin{align*} \end{align*} \\
\frac{1}{y} = -\frac{1}{3}x^2 + \frac{1}{x}C = \frac{-x^3 +3C}{3x}, 3C -> C \\
\begin{align*} \end{align*} \\
\therefore y = \frac{3x}{C - x^3}
Exact D.E.
M(x, y)dx + N(x, y)dy = 0 \\
\begin{align*} \end{align*} \\
\text{is exact if there exists a continuously differentiable function } f, \\
\begin{align*} \end{align*} \\
\frac{\partial f}{\partial x} = M, \frac{\partial f}{\partial y} = Nf(x, y) \text{가 연속인 편도함수를 가지면,} \\
\begin{align*} \end{align*} \\
df = \frac{\partial f}{\partial x}\cdot{dx} + \frac{\partial f}{\partial y}\cdot{dy} \\
\begin{align*} \end{align*} \\
f(x, y) = C \quad \text{라면, chain rule에 의해(또는 위의 df사용),} \\
\begin{align*} \end{align*} \\
\frac{df}{dx} = \frac{\partial f}{\partial x}\cdot\frac{dx}{dx} + \frac{\partial f}{\partial y}\cdot\frac{dy}{dx} = 0 \\
\begin{align*} \end{align*} \\
f_x + f_y \cdot \frac{dy}{dx} = 0 \\
\begin{align*} \end{align*} \\
\frac{dy}{dx} = - \frac{f_x}{f_y} \\
\begin{align*} \end{align*} \\
\therefore \text{이와 같은 형태의 미분방정식의 해는} \; f(x, y)= C \; \text{가 된다.}\nabla f(x, y) = < f_x, f_y > \\
\begin{align*} \end{align*} \\
\text{vector field : } \vec F = < M, N > \\
\begin{align*} \end{align*} \\
\vec F \text{는 gradient vector field = Slope field}- Exactness test 조건 :
M(x, y)dx + N(x, y)dy = 0 \\
\begin{align*} \end{align*} \\
\frac{\partial f}{\partial x} = M, \frac{\partial f}{\partial y} = N \\
\begin{align*} \end{align*} \\
\text{를 만족하는} \; f \; \text{가 존재한다고 가정하자}\\
\text{이 함수가 연속이고, 1차 편미분 또한 연속일 때,}\\
\begin{align*} \end{align*} \\
f_{xy} = f_{yx} \\
\begin{align*} \end{align*} \\
M_y = N_x \\
\begin{align*} \end{align*} \\
\text{반대로 } M_y \neq N_x \quad \text{이면} \quad f \quad \text{는 존재하지 않음.} \\
\begin{align*} \end{align*} \\
\therefore \text{exactness test 조건이 됨.}
간단히 말해, M을 y에 대해 미분, N을 x에 대해 미분하여 두 값이 같은지 비교해보면 exact D.E.인지 확인이 가능하다.
- 해를 구하는 방법
M, N을 각각 x, y에 대해 적분해보면 둘 다 f(x, y)이므로 이 값을 비교해보면 f(x, y)를 구할 수 있다.
\int M dx = \int N dy = f(x, y)
예)
(x^2 + xy^2)dx + (x^2y - y^3)dy = 0
M_y = 2xy = N_x \\
\begin{align*} \end{align*} \\
\therefore \text{exact D.E.} \\
\begin{align*} \end{align*} \\
\int Mdx = \int {x^2 + xy^2}dx = \frac{1}{3}x^3 + \frac{1}{2}x^2y^2 + C(y) \\
\begin{align*} \end{align*} \\
\int Ndy = \int{x^2y-y^3}dy = \frac{1}{2}x^2y^2 - \frac{1}{4}y^4 + C(x) \\
\begin{align*} \end{align*} \\
\text{compare these two, } \\
\begin{align*} \end{align*} \\
C(y) = -\frac{1}{4}y^4 + C_1, C(x) = \frac{1}{3}x^3 + C_2 \\
\begin{align*} \end{align*} \\
\therefore f(x, y) = \frac{1}{3}x^3 + \frac{1}{2}x^2y^2 -\frac{1}{4}y^4 = CLinear 2nd order D.E.
ay^{\prime\prime}(x) + by^{\prime}(x) + cy(x) = g(x)g(x) = 0 이면, homogeneous equation.
ay^{\prime\prime}(x) + by^{\prime}(x) + cy(x) = 0General solution for homogeneous eq.
lenearity에 의해, y1, y2가 방정식의 해라면 여기에 상수를 곱해도 여전히 해이고, y1, y2의 조합도 해가된다.
y_1, y_2 \; \text{가 special solution 이고, linearly independent 일 때,} \\
y = C_1y_1 + C_2y_2General solution for Non-homogeneous eq.
방정식을 만족시키는 특수해 를 찾으면, homogeneous solution에 이것만 더하면 일반해가 된다.
y = y_c + y_p, \\
y_c : \text{complementary solution, } \\
y_p : \text{particular solution } \\
\begin{align*} \end{align*} \\
\therefore y = C_1y_1 + C_2y_2 + y_p
general solution을 방정식에 대입해보면, 는 0이 되고, 만 남아 g(x)가 된다.
이제, 선형 2차 미분 방정식의 해를 구하는 다양한 방법을 케이스 바이 케이스로 알아보자.
2nd order D.E. : Reduction of Order.
하나의 해를 알고 있을 때, 나머지 해를 구하는 방법. 제목대로 치환을 해서 2차 미분 방정식을 1차 미분 방정식으로 낮춰서 푸는 방법이다.
\text{이미 알고 있는 해를 } \; y_1 \; \text{이라 하면,} \\
\text{나머지 하나의 해는 } \; y(x) = u(x)y_1(x) \\
\text{이 해를 대입해서 u(x)를 구하면 된다.}이와같이 u(x)를 구하는 과정에서 2차 미분 방정식을 1차 미분 방정식으로 치환하는 과정이 추가로 나오게 됨.
예)
x^2y^{\prime\prime} + 3xy^{\prime} + y = 0, \quad y_1 = \frac{1}{x}y = uy_1 \; \text{이라고 놓으면,} \; y = u\cdot\frac{1}{x} \\
\begin{align*} \end{align*} \\
y^{\prime} = u^{\prime} \frac{1}{x} + u(-\frac{1}{x^2}), \quad y^{\prime\prime} = u^{\prime\prime}\frac{1}{x} - u^{\prime}\frac{2}{x^2} - u(\frac{2}{x^3}) \\
\begin{align*} \end{align*} \\
\text{방정식에 대입하면,} \\
\begin{align*} \end{align*} \\
x^2[u^{\prime\prime}\frac{1}{x} - u^{\prime}\frac{2}{x^2} + u\frac{2}{x^3}] + 3x[u^{\prime}\frac{1}{x} - u\frac{1}{x^2}] + u\frac{1}{x} = 0 \\
\begin{align*} \end{align*} \\
xu^{\prime\prime} + u^{\prime} = 0 \\
\begin{align*} \end{align*} \\
v = u^{\prime} \; \text{으로 치환하면,} \\
\begin{align*} \end{align*} \\
xv^{\prime} + v = 0 \\
\begin{align*} \end{align*} \\
\text{seperable 1st order D.E으로 v를 구할 수 있다.}\\\frac{dv}{dx}x = -v \\
\begin{align*} \end{align*} \\
-\frac{1}{v}dv = \frac{1}{x}dx \\
\begin{align*} \end{align*} \\
\ln v = -\ln x + C_1 \\
\begin{align*} \end{align*} \\
v = e^{-\ln 1/x}\cdot e^{C_1}, \; e^{C_1} \rightarrow C_1 \\
\begin{align*} \end{align*} \\
v = C_1e^{-\ln 1/x} = \frac{C_1}{x} \\
\begin{align*} \end{align*} \\
\therefore u = C_1\ln x + C_2 \\
\begin{align*} \end{align*} \\
\text{general solution : } \; y = uy_1 = C_1\frac{\ln x}{x} + \frac{C_2}{x}Reduction of Order : Non-homogeneous
예)
y^{\prime\prime} - 5y^{\prime} + 6y = e^{-x}, \quad y_1 = e^{3x}\begin{aligned}
\text{let,} \quad &y = uy_1 = ue^{3x} \\
&y^{\prime} = u^{\prime} e^{3x} + 3ue^{3x} \\
&y^{\prime\prime} = u^{\prime\prime} e^{3x} + 6u^{\prime} e^{3x} + 9ue^{3x}
\end{aligned}위 값들을 원래 식에 대입하면,
\begin{aligned}
&e^{3x}[u^{\prime\prime} + 6u^{\prime} + 9u - 5(u^{\prime} 3u) + 6u] &= e^{-x} \\
&u^{\prime\prime} + u^{\prime} &= e^{-4x}
\end{aligned}\begin{aligned}
\text{let,} \quad &v = u^{\prime} ,\\
&v^{\prime} + v = e^{-4x} \\
&\frac{dv}{dx} + v -e^{-4x} = 0 \\
\text{integrating factor : } \quad &e^{\int1\cdot dx} = e^x ,\\
&e^x \frac{dv}{dx} + e^xv - e^{-3x} = 0 \\
&[ve^x]^{\prime} = e^{-3x} \\
&ve^x = \int e^{-3x}dx = -\frac{1}{3}e^{-3x} +C_1 \\
&v = -\frac{1}{3}e^{-4x} + C_1e^{-x} \\
u = \int vdx &=\frac{1}{12}e^{-4} + C_1e^{-x} + C_2 \\
\therefore y &= \frac{1}{12}e^{-x} + C_1e^{2x} + C_2e^{3x}
\end{aligned}2nd order D.E. : Constant Coefficients
다음과 같이, coefficients 가 constant 일 때 풀이방법이다.
ay^{\prime\prime} + by^{\prime} +cy = 0 \\ \text{a, b, c are constants}이렇게 constant coefficients를 갖는 경우는 다음의 해를 이용한다.
\begin{aligned}
\text{let, }\quad &y = e^{mx} \\
&y^{\prime} = me^{mx} \\
&y^{\prime\prime} = m^2e^{mx}
\end{aligned}이 값들을 원래 방정식에 넣어보면,
e^{mx}(am^2 + bm + c) = 0 \\
\begin{align*} \end{align*} \\
e^{mx} \;\text{는 0이 아니므로,} \\
\begin{align*} \end{align*} \\
am^2+bm+c = 0\\
coefficients들의 단순 2차방정식을 풀면 해를 구할 수 있다. 이 2차방정식을 characteristic polynomial form 이라고 부른다. 2차방정식의 해가 실수인 2개인 경우는 문제가 없는데, 중복해로 하나만 존재하는 경우, 허수의 해가 존재하는 경우가 문제다. 각 케이스별로 어떻게 풀어야 하는지 차차 알아볼 것이다.
i) 두 개의 실수 해를 갖는 경우,
예)
y^{\prime\prime} + 3y^{\prime} + 2y = 0characteristic eq.
\begin{aligned}
m^2 +3m + 2 = 0 \\
(m+1)(m+2) = 0 \\
m = -1, -2 \\
\therefore y = C_1e^{-x} + c_2e^{-2x}
\end{aligned}ii) 중복해, 하나의 해 인 경우, 를 또 다른 해로 놓으면 된다.
\begin{aligned}
\text{let, } \; y &= xe^{mx} \\
y^{\prime} &= e^{mx} + mxe^{mx} \\
y^{\prime\prime} &= 2me^{mx} + m^2xe^{mx}
\end{aligned}위의 값을 방정식에 대입하면,
a[2me^{mx} + m^2e^{mx}] + b[e^{mx} + mxe^{mx}] + cxe^{mx} \\
e^{mx}[2am + axm^2+b+bxm+cx] \\
e^{mx}[x(am^2+bm+c) + (2am+b)] \\
am^2 +bm +c=0 \; \text{이므로, }\\
e^{mx}(2am+b) \\
\text{해가 하나라는건, }\; m = \frac{-b}{2a} \; \text{이고 이를 대입하면, 방정식이 0이 됨을 알 수 있다.}\\
\begin{aligned} \end{aligned} \\
\therefore y = xe^{mx} \; \text{is another solution}예)
\begin{aligned}
y^{\prime\prime} + 2y^{\prime} + y = 0 \\
m^2 + 2m + 1 = 0, \\
(m+1)^2 = 0, \;m = -1 \\
y = C_1e^{-x} + C_2xe^{-x}
\end{aligned}iii) complex solution을 갖는 경우:
위의 해로부터, 다음과 같은 일반해를 갖는다.
y = e^{\alpha x}(C_1cos\beta x + c_2sin\beta x)증명)
Euler’s Formula :
\begin{aligned}
e^{\beta i x} &= cos\beta x + isin\beta x \\
e^{-\beta ix} &= cos(-\beta x) + isin(-\beta x) = cos(\beta x) - isin(\beta x)
\end{aligned}y = e^{(\alpha \pm \beta i)x} \\
y_1 = e^{\alpha x}\cdot e^{\beta ix}, \; y_2 = e^{\alpha x}\cdot e^{-\beta ix} \\
y_1 = e^{\alpha x}[cos\beta x + isin\beta x], \; y_2 = e^{\alpha x}[cos\beta x - isin\beta x] \\
\begin{aligned} \end{aligned} \\
\text{let, }
\begin{cases}
k_1 = \frac{1}{2}y_1 + \frac{1}{2}y_2 = e^{\alpha x}cos\beta x\\
k_2 = \frac{1}{2i}y_1 + \frac{1}{2i}y_2 = e^{\alpha x}sin\beta x\\
\end{cases} \\
k_1, k_2 \; \text{는}\; y_1, y_2\;\text{의 linear combination 이므로,} \\
\text{새로운 lineary independent solution 이다.} \\
\begin{aligned} \end{aligned} \\
\therefore y = e^{\alpha x}(C_1cos\beta x + C_2sin\beta x)예)
y^{\prime\prime} - 2y^{\prime} +5y = 0 \\
\begin{aligned} \end{aligned} \\
m = \frac{2\pm\sqrt{4 - 4\times 5}}{2} = 1\pm2i \\
\therefore y = e^x(C_1cos2x + C_2sin2x)2nd order D.E. : Undetermined Coefficients
앞의 Constants coefficients 로 다룬건 homogeneous eq.의 경우이고, 여기선 non-homogeneous 인 경우를 다룬다.
ay^{\prime\prime} + by^{\prime} + cy = g(x)앞의 constant coefficients 방법을 이용해서 homogeneous 인 경우의 해를 구해놓고 여기에 특수해를 구하면 그것이 non-homogeneous 인 경우의 일반해가 된다.
특수해 는 g(x)의 형태에 따라 다음과 같다.
\begin{matrix}
g(x) \quad\rightarrow &y_p\\
\begin{aligned} \end{aligned} \\
\text{Constant} &A \\
\begin{aligned} \end{aligned} \\
\text{Linear Polynomial} & Ax +B \\
\begin{aligned} \end{aligned} \\
\text{Quadratic Polynomial} & Ax^2 + Bx + C \\
\begin{aligned} \end{aligned} \\
sin\alpha x \;\text{or} \; cos\alpha x &Acos\alpha x +Bsin\alpha x \\
\begin{aligned} \end{aligned} \\
e^{\alpha x} &Ae^{\alpha x}
\end{matrix}예)
y^{\prime\prime} + 3y^{\prime} + 2y = 8\text{i) homogeneous solution(constant coefficient)} \\
m^2 + 3m + 2 = 0 \\
(m+1)(m+2) = 0, \; m = -1, -2 \\
y_c = C_1e^{-x} + C_2e^{-2x} \\
\begin{aligned} \end{aligned} \\
\text{ii)} g(x) \;\text{is constant form} \\
y_p = C \\
0 + 3\cdot0 +2\cdot C = 8 \\
\therefore C = 4, \; y_p = 4 \\
\begin{aligned} \end{aligned} \\
\text{general solution : }\; y = y_c + y_p = C_1e^{-x} + C_2e^{-2x} + 4Exceptional case : is linearly dependent
가 에 linearly dependent 하다면 이 는 특수해를 만족시키지 못해 쓸 수 없다. 이럴 땐, 기존에 사용하려고 했던 에 constant coefficients에서 중복해의 경우처럼 x를 곱해 사용한다. 중복되는 해를 임의로 이라고하면 이 해는 형태이므로,
y_p = A\cdot x\cdot y_1 = A\cdot x\cdot e^{mx}이 값을 방정식에 적용하기 위해 미분해보면,
\begin{aligned}
y_p &= A\cdot xy_1 \\
y_p^{\prime} &= A\cdot(xy_1)^{\prime} =A\cdot y_1 + A\cdot xy_1^{\prime}\\
y_p^{\prime\prime} &= A\cdot(xy_1)^{\prime\prime} = A\cdot 2y_1^{\prime} + A\cdot xy_1^{\prime\prime}
\end{aligned}이를 방정식에 대입하면,
A\cdot [a(xy_1^{\prime\prime} + 2y_1^{\prime}) + b(xy_1^{\prime} + y_1) + cxy_1] = g(x) \\
A\cdot [x(ay_1^{\prime\prime} + by_1^{\prime} + cy_1) + 2ay_1^{\prime} + by_1] = g(x) \\
ay_1^{\prime\prime} + by_1^{\prime} + cy_1 = 0 \; \text{이므로, } \\
A\cdot [2ay_1^{\prime} + by_1] = g(x) \\특수해가 중복되는 경우는 g(x) 가 인 경우이므로,
A\cdot (2a + b)e^{mx} = e^{m x} \\
\begin{aligned} \end{aligned} \\
A = \frac{1}{2a+b}
위와같이 A를 구하면, 로부터 를 구할 수 있다.
예)
y^{\prime\prime} + 3y^{\prime} +2y = e^{-2x}m^2 + 3m + 2 = 0 \\
(m+1)(m+2) = 0 \;, m = -1, -2 \\
y_c = C_1e^{-x} + C_2e^{-2x} \\
g(x) = e^{-2x} \rightarrow y_p = Ae^{-2x}특수해가 보조해와 중복된다.
\text{let, }\; y_p = Axe^{-2x} \\
y_p^{\prime} = A2^{-2x} + Ax(-2e^{-2x}) \\
y_p^{\prime\prime} = -4Ae^{-2x} + 4Axe^{-2x} 위 값을 대입해보면,
[-4Ae^{-2x} + 4Axe^{-2x}] + 3[Ae^{-2x} - 2Axe^{-2x}] + 2[Axe^{-2x}] = e^{-2x} \\
-Ae^{-2x} = e^{-2x} \\
\therefore A = -1해는 다음과 같다.
y_p = -xe^{-2x} \\
y = C_1e^{-x} + C_2e^{-2x} - xe^{-2x}Wronskian For a Group of Functions
n개의 주어진 함수에 대해 Wronskian은 다음과 같이 정의
W = det
\begin{bmatrix}
y_1 &... &y_n \\
y_1^{\prime} & &y_n^{\prime} \\
y_1^{\prime\prime} &\ddots &y_n^{\prime\prime} \\
\vdots & &\vdots \\
y_1^{(n-1)} & &y_n^{(n-1)} \\
\end{bmatrix}정확한 증명은 이해를 못했지만, 대략 다음과 같이 정리가능.
n개의 함수들 과 이들의 미분으로 만들어진 matrix A와 n개의 element 으로 구성된 벡터 C를 다음과 같이 써보자.
\begin{bmatrix}
y_1 &... &y_n \\
y_1^{\prime} & &y_n^{\prime} \\
y_1^{\prime\prime} &\ddots &y_n^{\prime\prime} \\
\vdots & &\vdots \\
y_1^{(n-1)} & &y_n^{(n-1)} \\
\end{bmatrix}
\begin{bmatrix}
C_1 \\
C_2 \\
C_3 \\
\vdots \\
C_n
\end{bmatrix} = 0A가 singular matrix( det(A) = 0 )이면, A의 역행렬이 존재하지 않으므로,
C_1y_1 + C_2y_2 + \dots + C_ny_n = 0 \\
C_1y_1^{\prime} + C_2y_2^{\prime} + \dots + C_ny_n^{\prime} = 0 \\
\vdots \\
C_1y_1^{n-1} + C_2y_2^{n-1} + \dots + C_ny_n^{n-1} = 0 \\즉,
C_1y_1 = -(C_2y_2 + \dots + C_ny_n)
와 같이 n개의 함수들은 서로 다른 함수에 대해 dependent하다.
A의 역행렬이 존재(det(A) 0) 하면, C는 trivial solution zero vector 만 갖게 되므로 n개의 함수 는 서로 linearly independent 하다.
다시말해,
W(x) \ne 0 \quad \rightarrow y_1, y_2, \dots, y_n \quad \text{are linearly independent}예)
e^{4x}, xe^{4x}W =
\begin{vmatrix}
e^{4x} &xe^{4x} \\
4e^{4x} &e^{4x} + 4xe^{4x} \\
\end{vmatrix}
= e^{8x} \\
\begin{aligned}
\end{aligned} \\
\therefore e^{4x} \quad \text{and} \quad xe^{4x} \quad \text{are linearly independent}exponential에 x를 곱하면 서로 linearly independent 한걸 여기서 보여주기 때문에. 앞에서 constant coefficient의 중복해나 undetermined coefficent에서 exponential 형태의 해가 겹칠 때, x를 곱해준게 어떻게 다른 해가 되는지 여기서 알 수 있다.
2nd order D.E. : Variation of Parameters
y^{\prime\prime} + P(x)y^{\prime} + Q(x)y = g(x)y_c = C_1y_1 + C_2 y_2 \quad \text{일 때,}\\
y_p = u_1(x)y_1 + u_2(x)y_2 \quad \text{라고 놓고} \; u_1, u_2 \text{를 구하는 방법.}
\begin{aligned}
y_p &= u_1y_1 + u_2y_2 \\
y_p^{\prime} &= u_1^{\prime} y_1 + u_1y_1^{\prime} + u_2^{\prime} y_2 + u_2y_2^{\prime} \\
y_p^{\prime\prime} &= u_1^{\prime\prime} y_1 + u_1^{\prime} y_1^{\prime} + u_1^{\prime} y_1^{\prime} + u_1y_1^{\prime\prime} + u_2^{\prime\prime} y_2 + u_2^{\prime} y_2^{\prime} + u_2^{\prime} y_2^{\prime} + u_2y_2^{\prime\prime} \\
&= u_1^{\prime\prime} y_1 + 2u_1^{\prime} y_1^{\prime} + u_1y_1^{\prime\prime} + u_2^{\prime\prime} y_2 + 2u_2^{\prime} y_2^{\prime} + u_2y_2^{\prime\prime}
\end{aligned}방정식에 대입하면,
\begin{aligned}
[u_1^{\prime\prime} y_1 + 2u_1^{\prime} y_1^{\prime} + u_1y_1^{\prime\prime} + u_2^{\prime\prime} y_2 + 2u_2\prime y_2\prime + u_2y_2^{\prime\prime}] + \\
P(x)[u_1^{\prime} y_1 + u_1y_1^{\prime} + u_2^{\prime} y_2 + u_2y_2^{\prime}] + \\
Q(x)[u_1y_1 + u_2y_2] = g(x) \\
\end{aligned} \\
\begin{aligned} \end{aligned} \\
\begin{aligned}
u_1[y_1^{\prime\prime} + P(x)y_1^{\prime} + Q(x)y_1] +\\
u_2[y_2^{\prime\prime} + P(x)y_2^{\prime} + Q(x)y_2] + \\
(y_1u^{\prime\prime} + y_1^{\prime} u_1^{\prime}) + (y_2u_2^{\prime\prime} + y_2^{\prime} u_2^{\prime}) + P(x)(y_1u_1^{\prime} + y_2u_2^{\prime}) + y_1^{\prime} u_1^{\prime} + y_2^{\prime} u_2^{\prime} = g(x)
\end{aligned} \\앞의 두 항은 homogeneous eq. 의 해 이므로 0이 됨. 마지막 항은 괄호로 묶은 부분을 정리해보면,
\frac{d}{dx}(y_1u_1^{\prime} + y_2u_2^{\prime}) + P(x)(y_1u_1^{\prime} + y_2u_2^{\prime}) + y_1^{\prime} u_1^{\prime} + y_2^{\prime} u_2^{\prime} = g(x) \\
y_1u_1^{\prime} + y_2u_2^{\prime} = 0 \quad \text{을 만족한다고 가정(일종의 trick),} \\
\begin{aligned} \end{aligned} \\
\begin{cases}
&y_1u_1^{\prime} + y_2u_2^{\prime} = 0 \\
&y_1^{\prime} u_1^{\prime} + y_2^{\prime} u_2^{\prime} = g(x)\\
\end{cases} \\
\begin{aligned} \end{aligned} \\
\rArr \begin{bmatrix}
y_1 &y_2 \\
y_1^{\prime} &y_2^{\prime} \\
\end{bmatrix}
\begin{bmatrix}
u_1^{\prime} \\
u_2^{\prime} \\
\end{bmatrix}
=
\begin{bmatrix}
0 \\
g(x) \\
\end{bmatrix} \\
\begin{aligned} \end{aligned} \\
\text{크래머 공식으로 부터,} \\
\begin{aligned} \end{aligned} \\
u_1^{\prime} = \frac{W_1}{W}, \quad W_1 =
\begin{vmatrix}
0 &y_2 \\
g(x) &y_2^{\prime}
\end{vmatrix} \\
\begin{aligned} \end{aligned} \\
u_2^{\prime} = \frac{W_2}{W}, \quad W_2 =
\begin{vmatrix}
y_1 &0 \\
y_1^{\prime} &g(x)
\end{vmatrix} \\위의 값을 구해서 적분하면 를 구할 수 있고, 이로부터 해를 구할 수 있다. 해가 구해진다면, 중간에 했던 가정은 만족하며 별 문제가 되지 않는다.
Cauchy-Euler Eq.
ax^2y^{\prime\prime} +bxy^{\prime} + cy = 0\begin{aligned}
\text{let, }\quad y &= x^m \\
y^{\prime} &= mx^{m-1} \\
y^{\prime\prime} &= m(m-1)x^{m-2} \\
\end{aligned}위 값을 방정식에 대입하면,
\begin{aligned}
ax^2[m(m-1)x^{m-2}] + bxmx^{m-1} + cx^m &= 0 \\
x^m[am(m-1) + bm + c] &= 0 \\
am^2 + (b-a)m + c &= 0 \quad \text{solve this,} \\
\begin{aligned} \end{aligned} \\
\text{general solution : } \quad y = c_1x^{m1} + c_2x^{m2}
\end{aligned}예)
x^2y^{\prime\prime} - 3xy^{\prime} + 3y = 0 \\
\begin{aligned} \end{aligned} \\
m^2 + (-3-1)m + 3 = 0\\
(m-1)(m-3) = 0 \;, \; m = 1, 3 \\
\begin{aligned} \end{aligned} \\
\therefore y_1 = x, y_2 = x^3 \\
y = c_1x + c_2x^3constant coefficients 의 경우와 마찬가지 문제가 있다. 중복해와 complex number인 경우.
i) 두 개의 실수 해인경우,
y = C_1x^{m1} +C_2x^{m2}ii) 중복해인 경우,
y_1 = x^{m1}, y_2 = y_1\cdot ln|x| = x^{m1}\cdot ln|x| \\
\begin{aligned} \end{aligned} \\
y = C_1x^{m1} + c_2x^{m1}ln|x|iii) complex number가 해인 경우, Constant Coefficients 때와 유사하다.
m = \alpha \pm \beta i \\
\begin{aligned} \end{aligned} \\
y = C_1x^\alpha cos(\beta ln|x|) + C_2x^\alpha sin(\beta ln|x|)Cauchy-Euler Eq. Non-Homogeneous
ax^2y^{\prime\prime} + bxy^{\prime} + cy = g(x)i) 위의 방법으로 homogeneous solution 를 구함.
ii) 으로 나누고, variation of Parameters 이용.
W = \begin{vmatrix}
y_1 &y_2 \\
y_1^{\prime} &y_2^{\prime}
\end{vmatrix},
W_1 = \begin{vmatrix}
0 &y_2 \\
g/ax^2 &y_2^{\prime}
\end{vmatrix},
W_2 = \begin{vmatrix}
y_1 &0 \\
y_1^{\prime} &g/ax^2
\end{vmatrix} \\
\begin{aligned} \end{aligned} \\
u_1^{\prime} = \frac{W1}{W}, u_2^{\prime} = \frac{W_2}{W} \\
\begin{aligned} \end{aligned} \\
y_p = u_1y_1 +u_2y_2 \\
\begin{aligned} \end{aligned} \\
y = y_c + y_p예)
x^2y^{\prime\prime} - 2xy^{\prime} -4y = \frac{1}{x}m^2 - 3m - 4 = 0 \\
(m-4)(m+1) = 0 , \quad m = 4, 1 \\
\begin{aligned} \end{aligned} \\
\therefore y_c = C_1x^4 + \frac{C_2}{x}\frac{g}{ax^2} = x^{-3} \\
\begin{aligned} \end{aligned} \\
W = \begin{vmatrix}
x^4 &x^{-1} \\
4x^3 &-x^{-2}
\end{vmatrix} = -x^2 - 4x^2 = -5x^2 \\
\begin{aligned} \end{aligned} \\
W_1 = \begin{vmatrix}
0 &x^{-1} \\
x^{-3} &-x^{-2}
\end{vmatrix} = -x^{-4} \\
\begin{aligned} \end{aligned} \\
W_2 = \begin{vmatrix}
x^4 &0 \\
4x^3 &x^{-3}
\end{vmatrix} = x \\
\begin{aligned} \end{aligned} \\
u_1^{\prime} = \frac{-x^{-4}}{-5x^2} = \frac{1}{5}x^{-6}, \quad u_2^{\prime} =\frac{x}{-5x^2} = -\frac{1}{5}x^{-1} \\
\begin{aligned} \end{aligned} \\
u_1 = -\frac{1}{25}x^{-5}, \quad u_2 = -\frac{1}{5}ln|x| \\
\begin{aligned} \end{aligned} \\
\therefore y_p = \frac{-x^4}{25x^5} + (-\frac{1}{5})\cdot ln|x|\cdot\frac{1}{x} \\
\begin{aligned} \end{aligned} \\
= -\frac{1}{25x} - \frac{1}{5x}ln|x| y = y_c + y_p = C_1x^4 + C_2x^{-1} -\frac{1}{25}x^{-1} - \frac{ln|x|}{5x} \\
\begin{aligned} \end{aligned} \\
= C_1x^4 + C_2\frac{1}{x} - \frac{ln|x|}{5x}Laplace Transform
정의
\mathcal{L}\{f(t)\} = \int_0^\infin f(t)e^{-st}dtlaplace transform은 t의 함수를 t에 대해 적분하여 t를 없애고 대신, exponential 형태의 s의 함수로 바꿔주는 변환이다. 적분형태를 보면, f(t)에 exponentialy decrease하는 함수를 곱하므로, f(t)가 exponential 보다 크게 발산하지 않는 이상, 값은 수렴한다. 발산하는 경우는 라플라스 변환으로 다룰 수 없지만, 자연계에선 대부분 수렴하기 때문에 유효하다.
라플라스 변환을 미분방정식에서 사용하는 방법은 다음과 같다.
미분방정식을 라플라스 변환으로 변형하면, 보다 간단하게 풀이가 가능한 s에 대한 Algebraic expression형태가 된다. 여기서 s에 대한 해를 구한 후, 라플라스 역변환을 시켜주면 원래 구하고자 했던 미분방정식의 해가 된다. 방정식을 t에 대한 space에서 s에 대한 space로 변환 후, s를 쉽게 구한 후에 이걸 다시 t에 대한 space로 되돌리는 방식이다.
기호로는 다음과 같이 표시한다.
f(t) \quad \rightarrow \mathcal{L}\{ f(t) \} \rightarrow F(s) \\
\begin{aligned} \end{aligned}\\
f(t) \quad \leftarrow \mathcal{L}^{-1}\{ f(t) \} \leftarrow F(s)f(t) 는 원래의 함수이고 F(s) 는 라플라스 변환된 함수이다.
라플라스 변환은 특정 형태의 변환을 미리 계산해놓고 사용하는게 편하다. 여기서 다룰 형태는 다음의 6가지이다.
\begin{array}{ll}
\textcircled{1}\;\mathcal{L}\{1\} &\textcircled{4}\; \mathcal{L}\{e^{at}\} \\
\begin{aligned} \end{aligned} \\
\textcircled{2}\;\mathcal{L}\{t\} & \textcircled{5}\;\mathcal{L}\{\sin(kt)\} \\
\begin{aligned} \end{aligned} \\
\textcircled{3}\;\mathcal{L}\{t^n\} & \textcircled{6}\;\mathcal{L}\{\sinh(at)\} \\
\end{array}\begin{split}
\textcircled{1}\;\mathcal{L}\{1\} &= \int_0^\infin (1)\cdot e^{-st}dt = \lim\limits_{b \to \infin}\int_0^b\ e^{-st}dt \\
&=\lim\limits_{b \to \infin}[-\frac{1}{s}\cdot e^{-st}\rbrack_0^b = \lim\limits_{b \to \infin}[-\frac{1}{s}\cdot e^{-sb} -\frac{1}{s}\cdot e^{0}] \\
& b \to \infin \Rightarrow \frac{1}{s}\cdot e^{-sb} \to 0 \\
\begin{aligned} \end{aligned} \\
&\therefore \mathcal{L}\{1\} = \frac{1}{s}
\end{split}\begin{split}
\textcircled{2}\;\mathcal{L}\{t\} &= \int_0^\infin t\cdot e^{-st}dt \\
\text{let,} \; &u = t, du = dt, dv = e^{-st}dt, v = -\frac{1}{s}e^{-st}dt \\
\text{apply,}\;&\int uv\prime = \int [(uv)\prime - u\prime v]\\
&= \lim\limits_{b \to \infin}[-\frac{t}{s}e^{-st}]_0^b + \lim\limits_{b \to \infin}\frac{1}{s}\int_0^b e^{-st}dt \\
&= \lim\limits_{b \to \infin} [-\frac{t}{s}e^{-st} - \frac{1}{s^2}e^{-st}]_0^b \\
&= \lim\limits_{b \to \infin}[-\frac{b}{s}e^{-sb} - \frac{1}{s^2}e^{-sb}] - [0 - -\frac{1}{s^2e^0}] \\
& b \to \infin \Rightarrow [-\frac{b}{s}e^{-sb} - \frac{1}{s^2}e^{-sb}] \to 0, \\
\begin{aligned} \end{aligned} \\
\therefore &\mathcal{L}\{t\} = \frac{1}{s^2}
\end{split}\begin{split}
\textcircled{3}\;\mathcal{L}\{t^n\} & = \int_0^\infin {t^n}\cdot{e^{-st}}dt \\
\text{let,}\; &u = t^n, dv = e^{-st}dt, u^\prime = nt^{n-1}, v = -\frac{1}{s}e^{-st}\\
\text{use,} &\int{udv} = uv - \int u^\prime v\\
&= \lim\limits_{b \to \infin}[-\frac{t^n}{s}e^{-st}]_0^b - \int_0^b{nt^{n-1}}(-\frac{1}{s}e^{-st})dt \\
&\dots \\
&= \lim\limits_{b \to \infin}[-\frac{t^n}{s}e^{-st} - \frac{nt^{n-1}}{s^2}e^{-st} - \frac{n(n-1)t^{n-2}}{s^3}e^{-st}+ \dots]_0^b \\
\end{split}chain 형태의 적분은 다음 테이블을 이용해서 쉽게 값을 얻을 수 있다.
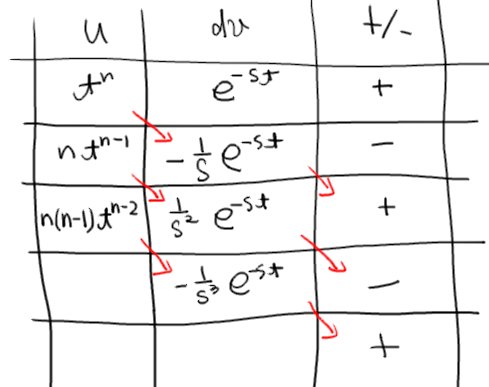
첫번째 컬럼은 미분을 해나가고, 두번째 컬럼은 적분을 해나가는 값이다.
\begin{split}
\text{when, }\; &b \to \infin , \Rightarrow e^{sb} \gg b^n\\
&=0 - (0 - 0 - \dots + \frac{n!}{s^{n+1}}) \\
\begin{aligned} \end{aligned} \\
&\therefore \mathcal{L}\{t^n \} = \frac{n!}{s^{n+1}}
\end{split}\begin{split}
\textcircled{4}\;\mathcal{L}\{e^{at}\} &=\int_0^\infin{e^{at}\cdot e^{-st}dt} = \int_0^\infin{e^{-(s-a)t}dt} \\
&=\lim\limits_{b \to \infin} [ -\frac{1}{s-a}e^{-(s-a)t} ]_0^b \\
&=\lim\limits_{b \to \infin}( -\frac{1}{s-a}e^{-(s-a)b}) - (-\frac{1}{s-a}e^0) \\
&\text{if, }\; s-a <0 \to \text{diverge}, \;s-a > 0 \to \text{converges to 0,}\\
\begin{aligned} \end{aligned}\\
\therefore \mathcal{L}\{e^{at}\}&= \frac{1}{s-a}, s> a
\end{split}\textcircled{5}\;\mathcal{L}\{\sin{kt}\} = \int _0^\infin { e^{-st}\cdot \sin{kt}\cdot dt } \\\begin{split}
\text{let, } \; u &= e^{-st}, dv = \sin{kt}\cdot dt, du = -se^{-st}dt, v = -\frac{1}{k}\cos{kt} \\
\text{then,} \;&\int{e^{-st}\cdot \sin{kt}\cdot dt}= -\frac{1}{k}e^{-st}\cos{kt} - \frac{s}{k}\int e^{-st}\cos{kt}dt \\
\text{once more let, } \; u &= e^{-st}, dv = \cos{kt}dt, du = -se^{-st}dt, v = \frac{1}{k}\sin{kt} \\
&= -\frac{1}{k}e^{-st}\cos{kt} - \frac{s}{k}[\frac{1}{k}e^{-st}\sin{kt} + \frac{s}{k}\int{e^{-st}\sin{kt}dt}] \\
&=-\frac{1}{k}e^{-st}\cos{kt} - \frac{1}{k^2}e^{-st}\sin{kt} - \frac{s^2}{k^2}\int{e^{-st}\sin{kt}dt} \\
\text{ 양변에 마지막 } &\text{적분을 상쇄하는 항을 더하면 적분형 상쇄되고,}\\
\int{e^{-st}\cdot \sin{kt}\cdot dt} + &\frac{s^2}{k^2}\int{e^{-st}\sin{kt}dt}=-\frac{1}{k}e^{-st}\cos{kt} - \frac{1}{k^2}e^{-st}\sin{kt} \\
\frac{k^2+s^2}{k^2}\int{e^{-st}\cdot\sin{kt}\cdot dt} &= -\frac{1}{k}e^{-st}\cos{kt} - \frac{1}{k^2}e^{-st}\sin{kt} \\
\begin{aligned} \end{aligned}\\
\therefore \int{e^{-st}\cdot \sin{kt}\cdot dt} &= \frac{k^2}{k^2+s^2}(-\frac{1}{k}e^{-st}\cos{kt} - \frac{1}{k^2}e^{-st}\sin{kt})
\end{split}\begin{split}
\int _0^\infin { e^{-st}\cdot \sin{kt}\cdot dt } &= \lim\limits_{b \to \infin} [\frac{k^2}{k^2+s^2}(-\frac{1}{k}e^{-st}\cos{kt} - \frac{1}{k^2}e^{-st}\sin{kt})]_0^b\\
&0(b \to \infin) - \frac{k^2}{k^2+s^2}(-\frac{1}{k} - 0) \\
\begin{aligned} \end{aligned}\\
\therefore \mathcal{L}\{\sin{kt}\} &= \frac{k}{k^2 + s^2}
\end{split}\begin{split}
\textcircled{6}\;\mathcal{L}\{\sinh{kt}\} &= \frac{1}{2}\int_0^\infin{(e^{kt} - e^{-kt})e^{-st}dt} \\
\because \sinh{kt} &= \frac{e^{kt} - e^{-kt}}{2} \\
&=\frac{1}{2}\int_0^\infin{(e^{(k-s)t} - e^{-(k+s)t})}dt \\
&=\lim\limits_{b \to \infin}\frac{1}{2}[\frac{1}{k-s}e^{(k-s)t} - \frac{1}{k+s}e^{-(k+s)t}]_0^b \\
&=\frac{1}{2}[\lim\limits_{b \to \infin}(\frac{1}{k-s}e^{(k-s)b}) + \frac{1}{k+s}e^{-(k+s)b}) - \frac{1}{k-s} + \frac{1}{k+s}] \\
& \text{only the convergence condition matters,}\\
&\quad k< s, (k>0 , s > 0 ) \; or \;(k < 0, s> 0) \\
\begin{aligned} \end{aligned}\\
\therefore \mathcal{L}\{\sinh{kt}\} &= \frac{k}{s^2-k^2}
\end{split}Linearity of Laplace Transforms
라플라스 변환의 특징으로 선형성이 있다.
\begin{split}
\mathcal{L}\{ {\alpha f(t) + \beta g(t)} \} &= \int_0^\infin{[\alpha f(t) + \beta g(t)]e^{-st}dt} \\
&= \alpha \int_0^\infin{f(t)e^{-st}dt} + \beta\int_0^\infin{g(t)e^{-st}dt} \\
&=\alpha \mathcal{L}\{ f(t) \} + \beta \mathcal{L}\{ g(t) \}
\end{split}앞에서 유도했던 라플라스 변환을 테이블로 정리해두면, 라플라스 변환 및 역변환을 적용하는데 도움이 된다.
\begin{array}{|c|c|}
\hline
f(t) & F(s) \\
\hline
1 & 1/s \\
\hline
t^n & n!/s^{n+1} \\
\hline
e^at & 1/(s-a), (s>a)\\
\hline
\sin{kt} & k/(s^2+k^2)\\
\hline
\cos{kt} & s/(s^2+k^2)\\
\hline
\sinh{kt} & k/(s^2-k^2)\\
\hline
\cosh{kt} & s/(s^2-k^2)\\
\hline
\end{array}선형성과 위 표를 사용하면, 복잡한 다항식도 손쉽게 변환/역변환이 가능하다.
예) laplace transform
\begin{split}
&\mathcal{L}\{ 3 - 5t + 2t^2 \} \\
&=\mathcal{L}\{ 1 \} -5 \mathcal{L}\{ t \} +2\mathcal{L}\{ t^2 \} \\
&= \frac{3}{s} - 5\frac{1}{s^2} + 2\frac{2}{s^3}
\end{split}예) Inverse laplace transform
\begin{split}
\mathcal{L}^{-1}\{ \frac{5}{s}\} &= 5\mathcal{L}^{-1}\{ \frac{1}{s}\} = 5 \times1 = 5\\
\mathcal{L}^{-1}\{ \frac{4}{s^2}\} &=4\mathcal{L}^{-1}\{ \frac{1}{s^{1+1}}\} = 4t^1 = 4t\\
\mathcal{L}^{-1}\{ \frac{7}{s-3}\} &=7\mathcal{L}^{-1}\{ \frac{1}{s-3}\} = 7e^{3t}\\
\mathcal{L}^{-1}\{ \frac{7}{3s -1}\} &=\frac{7}{3}\mathcal{L}^{-1}\{ \frac{1}{s -1/3}\} = \frac{7}{3}e^{-\frac{1}{3}t}\\
\end{split}Laplace Transforms of Derivatives
\begin{split}
\mathcal{L}\{ f^\prime(t)\} &= \int_0^\infin{e^{-st}f^\prime (t)dt} \\
\text{let, } \; &u = e^{-st}, dv = f^\prime(t)dt, du = -se^{-st}, v = f(t) \\
&= [e^{-st}f(t)]_0^\infin - \int_0^\infin {(-se^{-st})f(t)dt} \\
f(t) \text{의 증가율이 } &e^{-st} \text{보다 작다고 가정. 안그러면 diverse } \\
&= [0 - \frac{f(0)}{e^0}] + s\int_0^\infin{e^{-st}f(t)dt} \\
&= s\mathcal{L}\{ f(t) \} - f(0) \\
\begin{aligned} \end{aligned} \\
\therefore \mathcal{L}\{ f^\prime(t)\} &= sF(s) - f(0)
\end{split}for higher order,
\begin{split}
\mathcal{L}\{ f^{\prime\prime}(t)\} &=\mathcal{L}\{ [f^\prime(t)]^\prime\}\\
&= s\mathcal{L}\{ f^\prime(t)\} - f^\prime(0) \\
&=s^2F(s) - sf(0) - f^\prime(0) \\
\begin{aligned} \end{aligned} \\
\mathcal{L}\{ f^{\prime\prime\prime}(t)\} &= s^3F(s) - s^2f(0) - sf^\prime(0) - f^{\prime\prime}(0)\\
&\dots \\
\mathcal{L}\{ f^n(t) \} &= s^nF(s) - s^{(n-1)}f(0) - s^{(n-2)}f^\prime(0) \dots - f^{(n-1)}(0)
\end{split}예)
\begin{split}
f^{\prime\prime} - 2f^{\prime} + f &= 1 \\
\mathcal{L}\{ f^{\prime\prime} - 2f^{\prime} + f \} &= \mathcal{L}\{1\} \\
[s^2F(s) - sf(0) - f^\prime(0)] - 2[sF(s) - f(0)] + F(s) &= \frac{1}{s} \\
(s^2-2s+1)F(s) - (s-2)f(0) - f^\prime(0) &= \frac{1}{s} \\
F(s) = \frac{[\frac{1}{s} + (s-2)f(0) + f^\prime(0)]}{s^2 - 2s + 1}
\end{split}Laplace Transforms to Solve D.E.
예)
y^{\prime\prime} - y = e^{2t}, \quad y(0) = 0, y^\prime(0) = 1\begin{split}
\begin{cases}
\mathcal{L}\{y \} = F(s), \\
\mathcal{L}\{y^\prime \} =sF(s) - y(0) = sF(s), \\
\mathcal{L}\{y^{\prime\prime} \} =s^2F(s) - sy(0) - y^\prime(0) = s^2F(s) - 1
\end{cases}
\end{split}\begin{split}
\mathcal{L}\{ y^{\prime\prime} - y \} &= [s^2F(s) - 1] - F(s) \\
&= (s^2-1)F(s) - 1 = \mathcal{L}\{ e^{2t} \} = \frac{1}{s-2} \\
F(s) &= \frac{s-1}{(s-2)(s^2-1)} = \frac{s-1}{(s-2)(s-1)(s+1)} \\
\therefore F(s) &= \frac{1}{(s-2)(s+1)}
\end{split}\begin{split}
F(s) = \frac{1}{(s-2)(s+1)} &= \frac{a}{s-2} + \frac{b}{s+1}, \quad \text{find a, b}\\
&= \frac{a(s+1) + b(s-2)}{(s-2)(s+1)} \\
1 &= a(s+1) + b(s-2) = (a+b)s + a-2b \\
a+b = 0, a-2b&= 1 \to a = -b, -3b = 1\\
b &= -\frac{1}{3}, a =\frac{1}{3} \\
\begin{aligned} \end{aligned} \\
\therefore F(s) &= \frac{1}{3}[\frac{1}{s-2} - \frac{1}{s+1}]
\end{split}inverse laplace transform을 이용,
\begin{split}
y(t) &= \mathcal{L}^{-1}\{ F(s) \} = \frac{1}{3}[\mathcal{L}^{-1}\{ \frac{1}{s-2}\} - \mathcal{L}^{-1}\{ \frac{1}{s+1}\}] \\
&= \frac{1}{3}(e^{2t} - e^{-t})
\end{split}Unit Step Function
정의
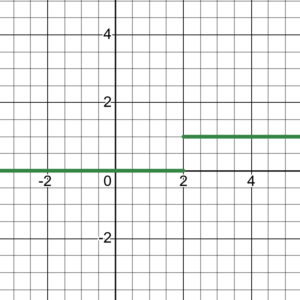
U(t-a) =
\begin{cases}
0 &0 \le t \lt a\\
1 & t \ge a
\end{cases}아래는 a = 2인 경우의 그래프
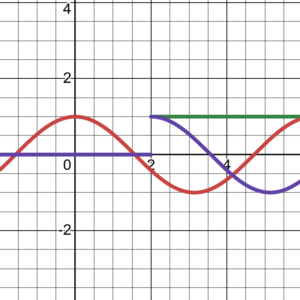
이 unit step function을 다른 함수에 곱하면, 특정 구간을 switch off 시킬 수 있다.
\begin{split}
f(t) = \sqrt{t}, \\
g(t) = \sqrt{t}\cdot U(t-2)
\end{split}위 식을 그래프로 그려보면,
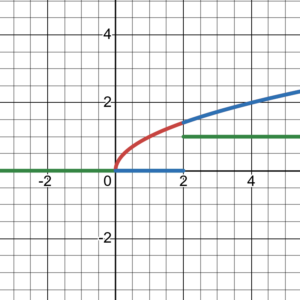
U(t-2) 가 녹색, f(t)가 빨강, g(t) 가 파랑 그래프이다. 그래프에서 보이듯이, f(t)에 U(t-2)를 곱하면, 2까지는 그래프가 0이었다가, 2부터 원래 f(t)의 그래프가 표시되는걸 볼 수 있다.
time delay도 가능한데, U(t)를 곱하면서 원래 함수도 같이 shift 시켜주면, 다음과 같이 된다.
\begin{split}
f(t) &\to f(t-2)\cdot U(t-2) \\
f(t)=\cos\left(t\right) &\to \cos\left(t-2\right)u\left(t-2\right)
\end{split}위 식과같이 원래 함수가 cos(t)일 때, u(t-2)를 곱해주면서 f(t) -> t(t-2)로 이동시키면,
Laplace Transforms Involving the Unit Step Function
Laplace transform과 Unit Step function을 다시 써보면 다음과 같다.
\begin{split}
\mathcal{L}\{ f(t) \} &= \int_0^\infin e^{-st}f(t)dt, \\
U(t-a) &= \begin{cases}
0 &0 \le t \lt a\\
1 & t \ge a
\end{cases}
\end{split}예)
\begin{split}
\mathcal{L}\{ U(t-a) \} &= \int_0^a{0\cdot e^{-st}dt} + \int_a^\infin{1\cdot e^{-st}dt} \\
&= [-\frac{1}{s}e^{-st}]_a^\infin \\
t \to \infin &\Rightarrow e^{-st} \to 0 \quad \text{이므로,}\\
&= 0 - (-\frac{1}{s}e^{-sa}) \\
\begin{aligned} \end{aligned} \\
\therefore \mathcal{L}\{ U(t-a) \} &= \frac{e^{-sa}}{s}
\end{split}\begin{split}
\mathcal{L}\{ f(t-a)U(t-a) \} &= \int_0^a{0\cdot U(t-a)e^{-st}dt} + \int_a^\infin{1\cdot f(t-a)e^{-st}dt}\\
&= \int_0^\infin{f(t-a)e^{-st}dt}\\
\text{let, } &\;w = t - a, dt = dw, t = w+a, \\
&=\int_a^\infin{e^{-s(w+a)}dw} = e^{-sa}\int_a^\infin{e^{-sw}f(w)dw} \\
&=e^{-sa}\mathcal{L}\{ f(w) \} = e^{-sa}\mathcal{L}\{ f(t-a) \} \\
\begin{aligned} \end{aligned} \\
\therefore \mathcal{L}\{ f(t-a)U(t-a) \} &= e^{-as}F(s)
\end{split}Impulse and Dirac Delta Function
역학에서 Impulse (충격량)은 다음과 같이 가해진 힘을 시간에 대해 적분한 값이다. 이것은 운동에너지의 적분으로부터, 운동량의 변화량과 같다는걸 알 수 있다. F(t)가 force일 때,
\begin{split}
\text{Impulse} &= \int_a^b{F(t)dt} \\
&=mv(b) - mv(a)
\end{split}힘이 가해지는 시간이 매우 짧아 0으로 수렴하는 경우, t = 0에서만 함수값이 존재하고 그 외에는 0이되는 함수를 생각할 수 있다. 다음과 같이 정의되는 함수를 살펴보자.
\frac{1}{k\sqrt{\pi}}\cdot e^{-\frac{t^2}{k^2}}이 함수는 Gaussian-delta function이라고 불리며, k값에 따라 함수의 폭이 변한다.
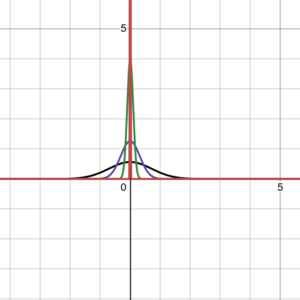
위 그래프는 검정 : k=0.5, 보라: k = 0.1, 녹색: k = 0.01, 빨강: k = 0.0001을 그린 그래프이다. k가 0에 수렴할 수록, 그래프는 0에서만 값을 갖는 날카로운 그래프가되지만, 적분을 하면 그 값이 1이 되는 함수다. 로 치환해서 적분하면 쉽게 확인이 가능하다. limit를 써서 표현하면, 다음과 같이 쓸 수 있으며, 이를 dirac-delta function이라고 부른다.
\delta_k(t) = \lim\limits_{k \to 0} \frac{1}{k\sqrt{\pi}}\cdot e^{-\frac{t^2}{k^2}}사실, 함수의 형태는 크게 중요하지 않다. 그저, 0으로 limit를 보낼 인자와 적분이 항상 1이면 충족한다. 예를들어,
y=
\begin{cases}
\frac{1}{2k}, &\quad(a-k\lt x\lt a+k) \\
0, &\quad x \lt a-k, x \gt a+k
\end{cases}위와같은 step function을 생각해보면, 적분했을 때 1의 값을 가지며(면적이 항상 1이다), 다음과 같이 그래프를 그릴 수 있다.
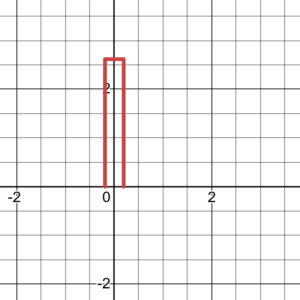
이 그래프는 를 취했을 때, 앞에서 말한 것처럼 0에서만 값을 갖지만 적분했을 때 값이 1이 되는 delta function 형태가 된다. 이처럼, Dirac-delta function은 함수의 모양보다는 그 특성이 중요하므로 다음과 같이 정의하고 사용이 가능하다.
\begin{split}
\text{Dirac-delta function :} &\quad \delta{(t-t_0)} \\
&\begin{cases}
\delta{(t-t_0)} = \infin, &t = t_0\\
\delta{(t-t_0)} = 0, & t \ne t_0
\end{cases}\\
&\int_{-\infin}^\infin{\delta(t-t_0)dt} = 1
\end{split}원래, 이런 형태는 수학에서 다룰 수 없는 특이점에 해당한다. 하지만, 앞에서 말한 충격량이나 점전하와 같이 물리에서 다루는 값들이 특이점으로 보이는 형태라서 이들을 다루는데 이 Dirac-delta function이 사용되고 매우 유용하다.
Laplacian transformation of Delta function
\mathcal{L}\{ \delta(t-t_0) \} = \int_0^\infin{\delta(t-t_0)e^{-st}dt} = 1\cdot e^{-st} = e^{-st}Solving D.E. with delta function
예)
y^\prime + y = \delta(t-1), \quad y(0) = 2
\begin{cases}
\mathcal{L}\{ y \} &= F(s) \\
\mathcal{L}\{ y^\prime \} &= sF(s) - y(0) = sF(s) - 2 \\
\mathcal{L}\{ \delta(t-1) \} &= e^{-s} \\
\end{cases}\begin{split}
sF(s) - 2 + F(s) &= e^{-s} \\
(s+1)F(s) &= e^{-s} + 2 \\
\therefore F(s) &= \frac{e^{-s}+2}{s+ 1} \\
y = \mathcal{L}^{-1}\{ \frac{2}{s+1} \} + \mathcal{L}^{-1}\{ \frac{e^{-s}}{s+1} \} & = 2e^{-t} + \mathcal{L}^{-1}\{ e^{-s}\frac{{1}}{s+1} \} \\
\text{from Unit step function,} \quad &\mathcal{L}^{-1}\{ e^{-sa}F(s) \} = f(t-a)U(t-a), F(s) = \frac{1}{s+1}\\
&=2e^{-t} + f(t-1)U(t-1) = 2e^{-t} + e^{-(t-1)}U(t-1)\\
\begin{aligned} \end{aligned} \\
\therefore y = 2e^{-t} + e^{-(t-1)}U(t-1)
\end{split}How to Shift the Index for Power Series
예1)
\Sigma_{n=1}^\infin a_nx^{n-1} + \Sigma_{n=0}^\infin na_nx^{n}이건 하나의 예인데, 위와 같이 power series가 있을 때, 이 둘을 합치는 방법은
- x 의 차수를 맞추는 방법
- n의 시작 인덱스를 맞추는 방법
두가지가 사용된다. 무한대의 급수이기 때문에, 이 두가지를 맞춰주면 앞에 몇개 항이 떨어져 나오고 그 뒤로는 같은 형태의 식이 된다. 위 식의 경우,
\text{let, } \; k = n-1, n = k+1 \\
\begin{aligned} \end{aligned} \\
\Sigma_{k=0}^\infin a_{k+1}x^{k} + \Sigma_{n=0}^\infin na_nx^{n} \\
\begin{aligned} \end{aligned} \\
= \Sigma_{n=0}^\infin (a_{n+1} +na_n)x^n예2)
\Sigma_{n=0}^\infin na_{n}x^{n-1} + \Sigma_{n=0}^\infin a_nx^{n+2} \\
\begin{aligned} \end{aligned} \\
\text{let, } \; k = n-1, n = k+1\quad \text{and} \quad j = n+2, n = j-2 \\
\begin{aligned} \end{aligned} \\
\Sigma_{k=0}^\infin na_{k+1}x^{k} + \Sigma_{j=2}^\infin a_{j-2}x^{j} \\
\begin{aligned} \end{aligned} \\
= a_1 + 2a_2x + \Sigma_{n=2}^\infin [(n+1)a_{n+1} + a_{n-2}]x^{n}예3)
\Sigma_{n=2}^\infin n(n-1)a_n x^{n-2} + x\Sigma_{n=1}^\infin na_n x^{n-1} + \Sigma_{n=0}^\infin a_n x^{n} \\
\begin{aligned} \end{aligned} \\
\text{let, } \quad k = n-2, n = k+2 \\
\begin{aligned} \end{aligned} \\
\Sigma_{k=0}^\infin {(k+1)(k+2)}a_{k+2} x^{k} + \Sigma_{n=1}^\infin {n}a_{n} x^{n} + \Sigma_{n=0}^\infin a_{n} x^{n} \\
\begin{aligned} \end{aligned} \\
= a_0 + 2a_2 + \Sigma_{n=1}^\infin[(n+1)a_n + (n+1)(n+2)a_{n+2}]x^nSolving D.E. with Power Series
예)
y^{\prime\prime} - xy = 0 \quad : \text{Airy's Eq.}\text{let, } \quad y = \Sigma_{n=0}^\infin a_nx^n \\
\begin{aligned} \end{aligned} \\
y\prime = \Sigma_{n=1}^\infin na_nx^{n-1} \\
\begin{aligned} \end{aligned} \\
y\prime\prime = \Sigma_{n=2}^\infin n(n-1)a_n x^{n-2}방정식에 대입하면,
\Sigma_{n=2}^\infin n(n-1)a_n x^{n-2} - x \Sigma_{n=0}^\infin a_nx^n = 0 \\
\begin{aligned} \end{aligned} \\
\text{let, } \quad k = n-2, n = k + 2, j = n+1, n = j-1
\begin{aligned} \end{aligned} \\
= \Sigma_{k=0}^\infin (k+1)(k+2)a_{k+2}x^k - \Sigma_{j=1}^\infin a_{j-1}x^{j} \\
\begin{aligned} \end{aligned} \\
= 2a_2 + \Sigma_{n=0}^\infin[(n+1)(n+2)a_{n+2} - a_{n-1}]x^n = 0\\
\begin{aligned} \end{aligned} \\
\therefore a_2 = 0, (n+1)(n+2)a_{n+2} - a_{n-1} = 0 \\
\begin{aligned} \end{aligned} \\
\rightarrow a_{n+2} = \frac{a_{k-1}}{a_{k+1}a_{k+2}}위의 관계식으로부터,
a_3 = a_0/5, \\ a_4 = a_1/12, \\ a_5 = a_2/20 = 0, \quad \because a_2 = 0, \\ \vdots \\
3번째 항마다 0이되고, 나머지는 에 의해 결정된다. 이 두 값이 자유도를 갖는다고 볼 수 있고, 서로 독립적인 임의의 값을 가정하면,
\text{let, } \quad a_0 = 1, a_1 = 0 \quad \text{or} \quad a_0 = 1, a_0 = 0\\
\begin{aligned} \end{aligned} \\
y_1(x) = a_0[1 + \frac{x^3}{6} + \dots] = 1 + \frac{1}{6}x^3 + \frac{1}{180}x^6 + \dots \\
\begin{aligned} \end{aligned} \\
y_2(x) = a_1[x + \frac{x^4}{12} + \dots] = x + \frac{1}{12}x^4 + \frac{1}{504}x^7 + \dotsSolving D.E.s(Linear System) with eigenvalue and eigenvector
\begin{aligned}
\frac{du}{dt} &= \lambda u \\
\text{solution :} \quad u(t) &= C\cdot e^{\lambda t} \\
\end{aligned} \\\text{for 2-D vector }\;\vec{u}, \\
\begin{aligned} \end{aligned} \\
\frac{d\vec{u}}{dt} = A\vec{u} \\
\begin{aligned} \end{aligned} \\
\text{two equations have two solutions.} \\
\text{let, } \; \vec{x_1}\; and\; \vec{x_2} \; \text{are solution vectors} \\
\begin{aligned} \end{aligned} \\
\text{generic solution:} \quad u = C_1\vec{x_1} + C_2\vec{x_2}
위에서처럼, 로 표현되는 n개의 linear differential equation system에서 를 만족하는 eigenvalue , eignevector 를 구하면, 를 와 같이 쓸 수 있고, 그 해는
\vec{u(t)} = \Sigma_{i=1}^n {C_i}\cdot\vec{x_i}\cdot e^{\lambda_i t}좀 더 구체적으로 2 by 2 matrix의 경우를 생각해보면,
\begin{bmatrix}
\frac{dx_1}{dt} \\
\begin{aligned} \end{aligned} \\
\frac{dx_2}{dt} \\
\end{bmatrix} =
\begin{bmatrix}
a & b \\
\begin{aligned} \end{aligned} \\
c & d \\
\end{bmatrix}
\begin{bmatrix}
x_1 \\
\begin{aligned} \end{aligned} \\
x_2 \\
\end{bmatrix}
를 먼저 푼다.
\begin{bmatrix}
a & b \\
\begin{aligned} \end{aligned} \\
c & d \\
\end{bmatrix}
\begin{bmatrix}
u_{11} \\
\begin{aligned} \end{aligned} \\
u_{12} \\
\end{bmatrix} =
\lambda
\begin{bmatrix}
u_{11} \\
\begin{aligned} \end{aligned} \\
u_{12} \\
\end{bmatrix}같은 표기는 매트릭스 엘리먼트와 혼동이 있지만, 여기서는 벡터 의 두 성분표시를 이렇게 하겠다.
이로부터 eigenvalue 와 eigenvector 를 구했다고 하면,
\begin{bmatrix}
\frac{dx_1}{dt} \\
\begin{aligned} \end{aligned} \\
\frac{dx_2}{dt} \\
\end{bmatrix} =
\lambda
\begin{bmatrix}
u_{11} \\
\begin{aligned} \end{aligned} \\
u_{12} \\
\end{bmatrix} \\
\begin{aligned} \end{aligned} \\
x_1 = C_1\cdot\vec{u_1}\cdot e^{\lambda_1 t}, x_2 = C_2\cdot \vec{u_2}\cdot e^{\lambda_2 t} \\
\begin{aligned} \end{aligned} \\
\text{generic solution : }\quad \vec{x} = C_1\cdot\vec{u_1}\cdot e^{\lambda_1 t} + C_2\cdot \vec{u_2}\cdot e^{\lambda_2 t} 예)
\begin{cases}
\frac{dx}{dt} = 4x - y \\
\begin{aligned} \end{aligned} \\
\frac{dy}{dt} = 2x + y \\
\end{cases}
\quad \rightarrow \quad
A =
\begin{bmatrix}
4 & -1 \\
\begin{aligned} \end{aligned} \\
2 & 1 \\
\end{bmatrix}
,\quad
det(A-\lambda I) = 0
det(A - \lambda I) =
\begin{vmatrix}
4-\lambda & -1 \\
2 & 1-\lambda
\end{vmatrix} = (4-\lambda)(1-\lambda) + 2 = \lambda^2 -5\lambda+6 \\
\begin{aligned} \end{aligned} \\
(\lambda-2)(\lambda-3) = 0, \lambda = 2, 3\begin{aligned}
\text{i)} \lambda_1 = 2 : &\\
& (A-2I)\vec{u} = 0,\quad \vec{u} \;\text{is eigenvector}\\
&\begin{bmatrix}
4-2 & -1 \\
\begin{aligned} \end{aligned} \\
2 & 1-2 \\
\end{bmatrix}
\begin{bmatrix}
u_{11} \\
\begin{aligned} \end{aligned} \\
u_{12} \\
\end{bmatrix}
=
\begin{bmatrix}
2 & -1 \\
\begin{aligned} \end{aligned} \\
2 & -1 \\
\end{bmatrix}
\begin{bmatrix}
u_{11} \\
\begin{aligned} \end{aligned} \\
u_{12} \\
\end{bmatrix}
\end{aligned} \\
2u_{11} = u_{12} \\
\text{let, }\; u_{11} = 1 \;\text{then,}\; u_{12} = 2 \\
\begin{aligned} \end{aligned} \\
\vec{u_1} =
\begin{bmatrix}
1 \\
\begin{aligned} \end{aligned} \\
2 \\
\end{bmatrix}
마찬가지로,
\begin{aligned}
\text{ii)} \lambda_2 = 3: & \\
&\begin{bmatrix}
4-3 & -1 \\
\begin{aligned} \end{aligned} \\
2 & 1-3 \\
\end{bmatrix}
\begin{bmatrix}
u_{21} \\
\begin{aligned} \end{aligned} \\
u_{22} \\
\end{bmatrix}
=
&\begin{bmatrix}
1 & -1 \\
\begin{aligned} \end{aligned} \\
2 & -2 \\
\end{bmatrix}
\end{aligned} \\
\begin{bmatrix}
u_{21} \\
\begin{aligned} \end{aligned} \\
u_{22} \\
\end{bmatrix} \\
\begin{aligned} \end{aligned} \\
u_{21} = u_{22}, \quad \text{let, } \; u_{21} = 1 \; \text{then, } \; u_{22} = 1 \\
\begin{aligned} \end{aligned} \\
\vec{u_2} = \begin{bmatrix}
1 \\
\begin{aligned} \end{aligned} \\
1 \\
\end{bmatrix} \\\therefore \vec{x} =
C_1
\begin{bmatrix}
1 \\
2
\end{bmatrix}
e^{2t} +
C_1
\begin{bmatrix}
1 \\
1
\end{bmatrix}
e^{3t}